
micro:bit Introduction
For students diving into coding, this introductory guide simplifies the initial setup of the micro:bit, paving the way for their first digital creation.
Introduction
Sensing the World
Humans and animals rely on sight, smell, hearing, taste, and touch to determine how to interact with their environment. When a human feels cold, they put on another layer of clothing. Animals listen for predators. Plants have stimuli for touch, which is different from what humans have. Like how a sunflower grows toward the sun. The question is, how do robots sense the world?
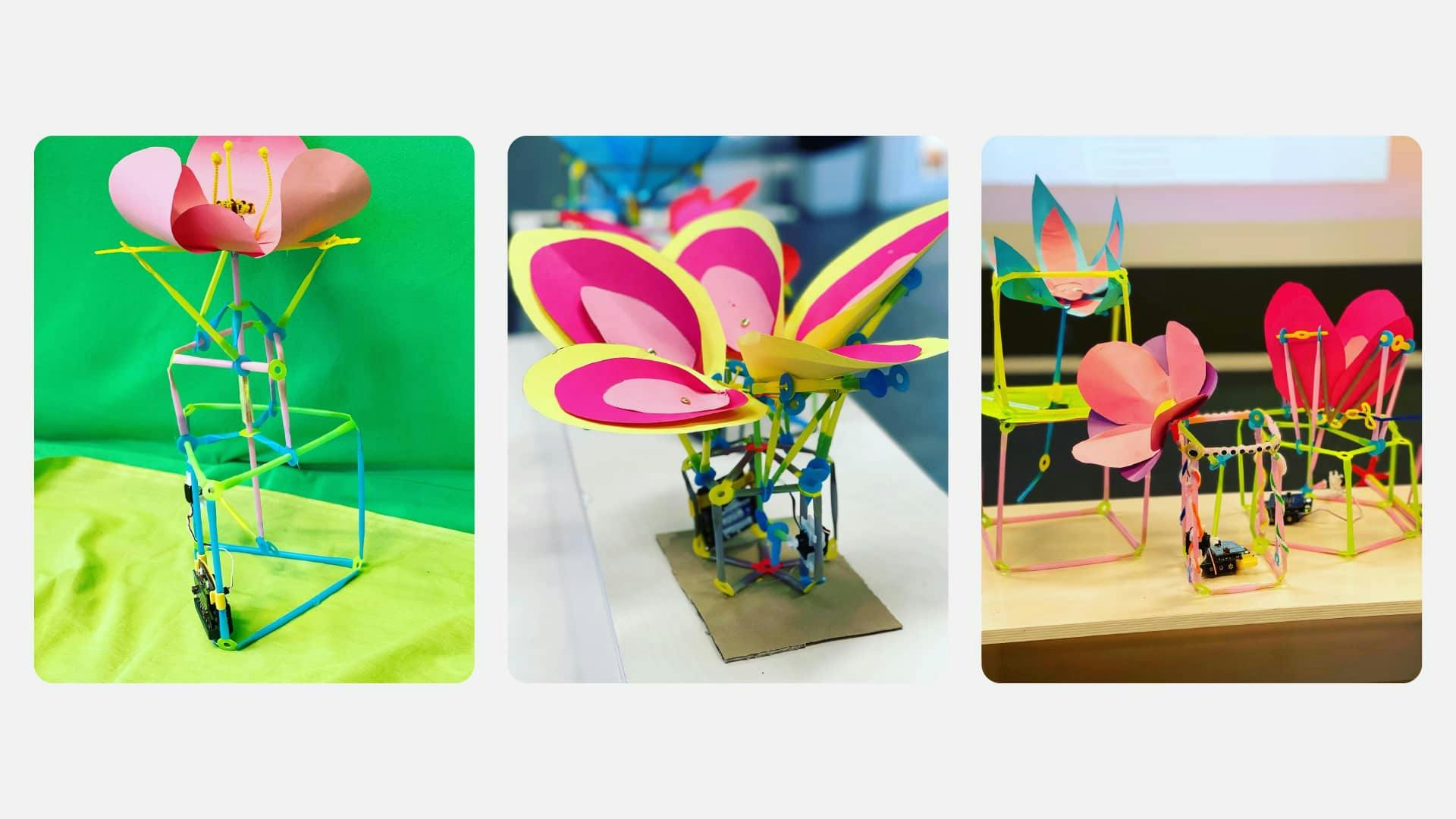
Plants that sense light bloomed by students of the Sollentuna Makerspace in Stockholm, Sweden engaged in the Plant Physiology lesson.
Since robots do not have natural senses like humans, they rely on sensors. A sensor is a device that can detect and respond to physical environment input. The robots can make decisions on how to engage their environment, but are unable to do so on their own. Meaning senses are created for them through sensor hardware such as a microphone to listen or a thermometer to feel hot or cold. When a robot is given instructions and guidelines by humans, it can ‘listen’ and ‘feel’ proactively.

The micro:bit is a small computer with built-in sensors. One thing you can do with a micro:bit is make a robot's senses interactive. To instruct a micro:bit-controlled robot on how to use sensors, the instructions are translated through MakeCode. You fit a combination of the block categories when programming. The inputs, outputs, and processors are known as brains and are used for your robot to sense the world.
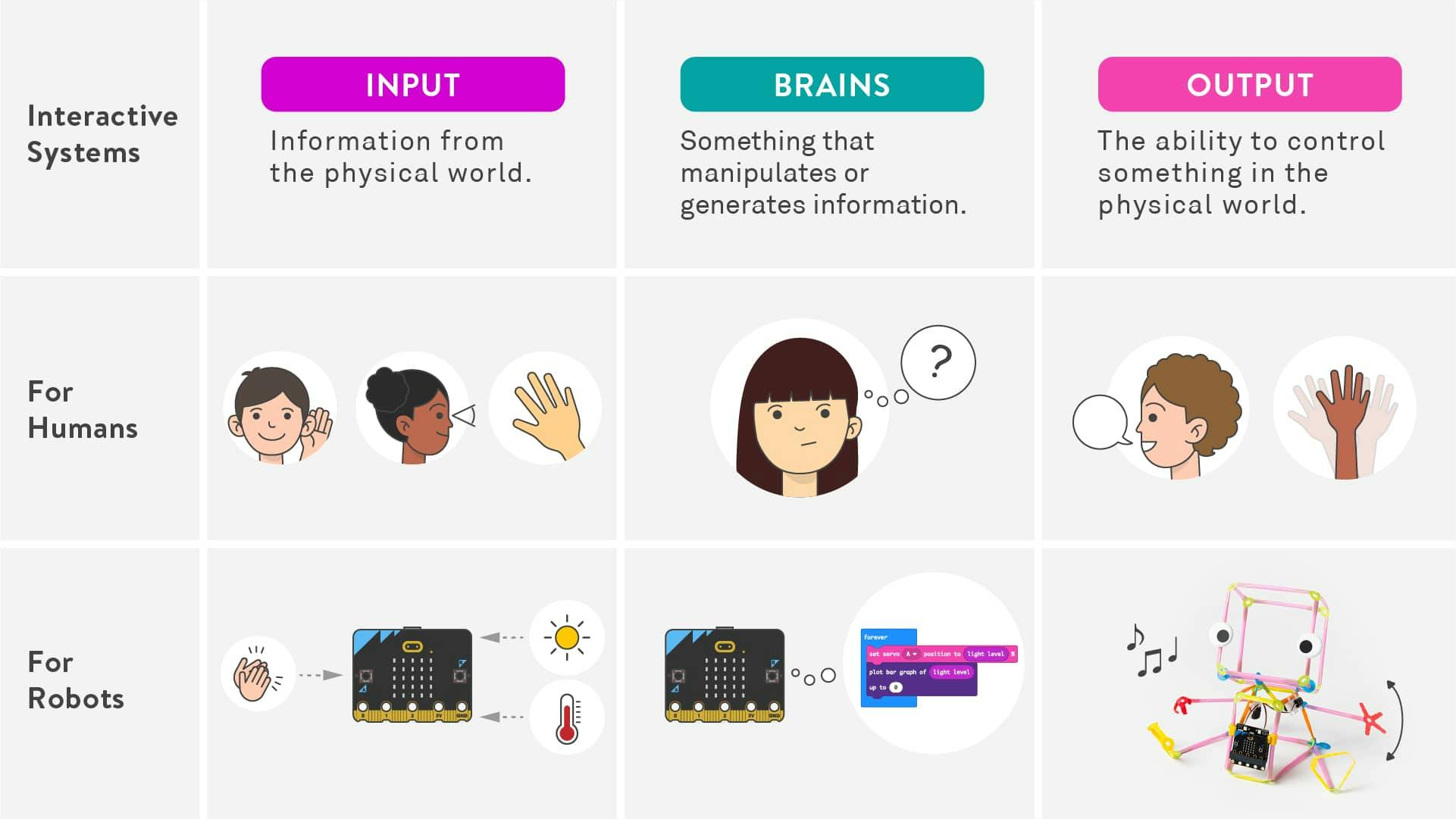
Robots begin with a simple sense (input), then collect and think about data (brain), and finally respond (output). Imagine a robot that can sense like an animal, plant or a new companion.
Living beings rely on all five senses to make decisions in complex situations. An animal uses taste and smell to identify plants for energy, while on alert listening and looking for predators. For an advanced interaction, you can program multiple inputs concurrently responding through a different output for the robot. The more information the robot can comprehend, the better it will navigate the world.
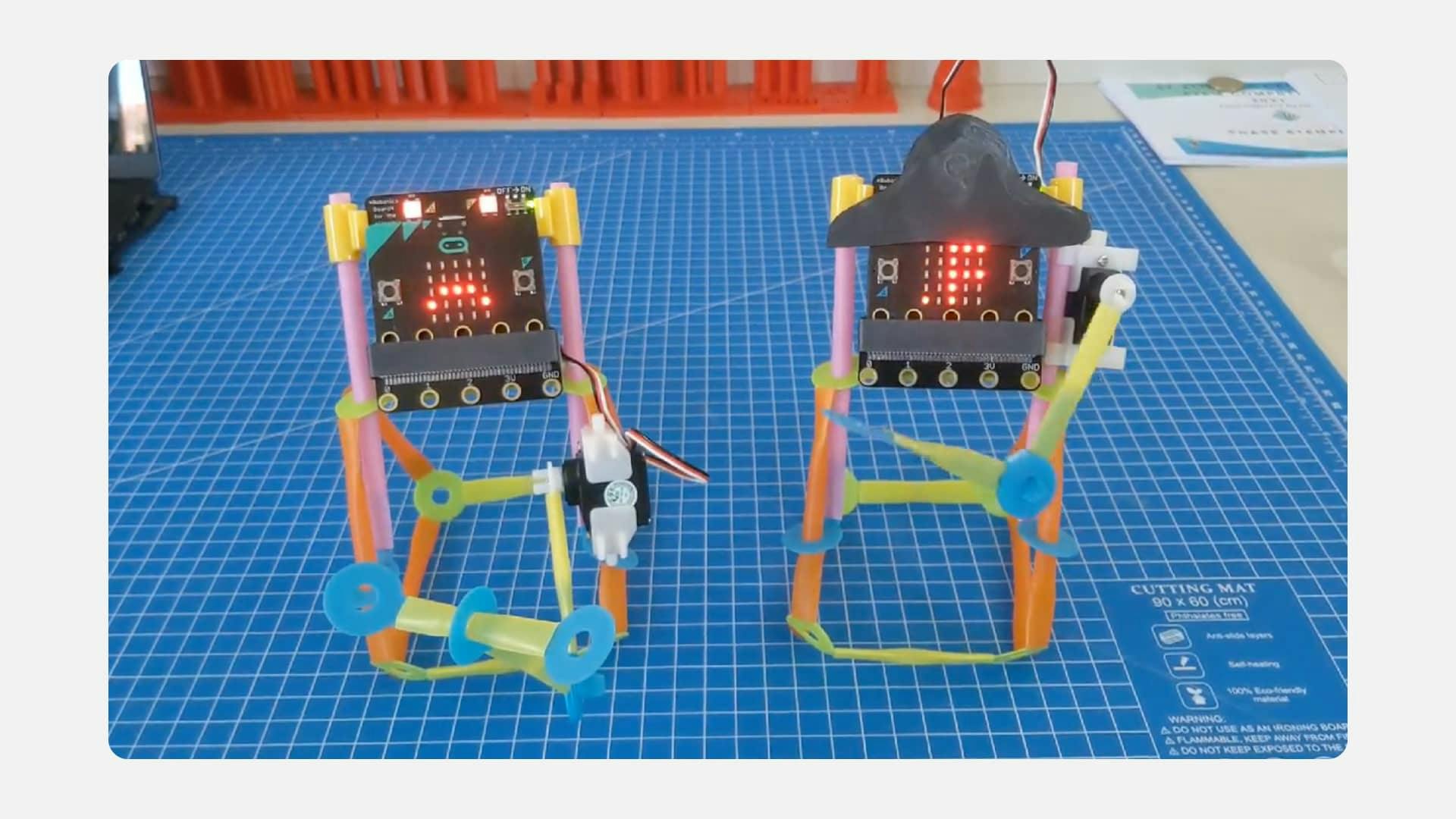
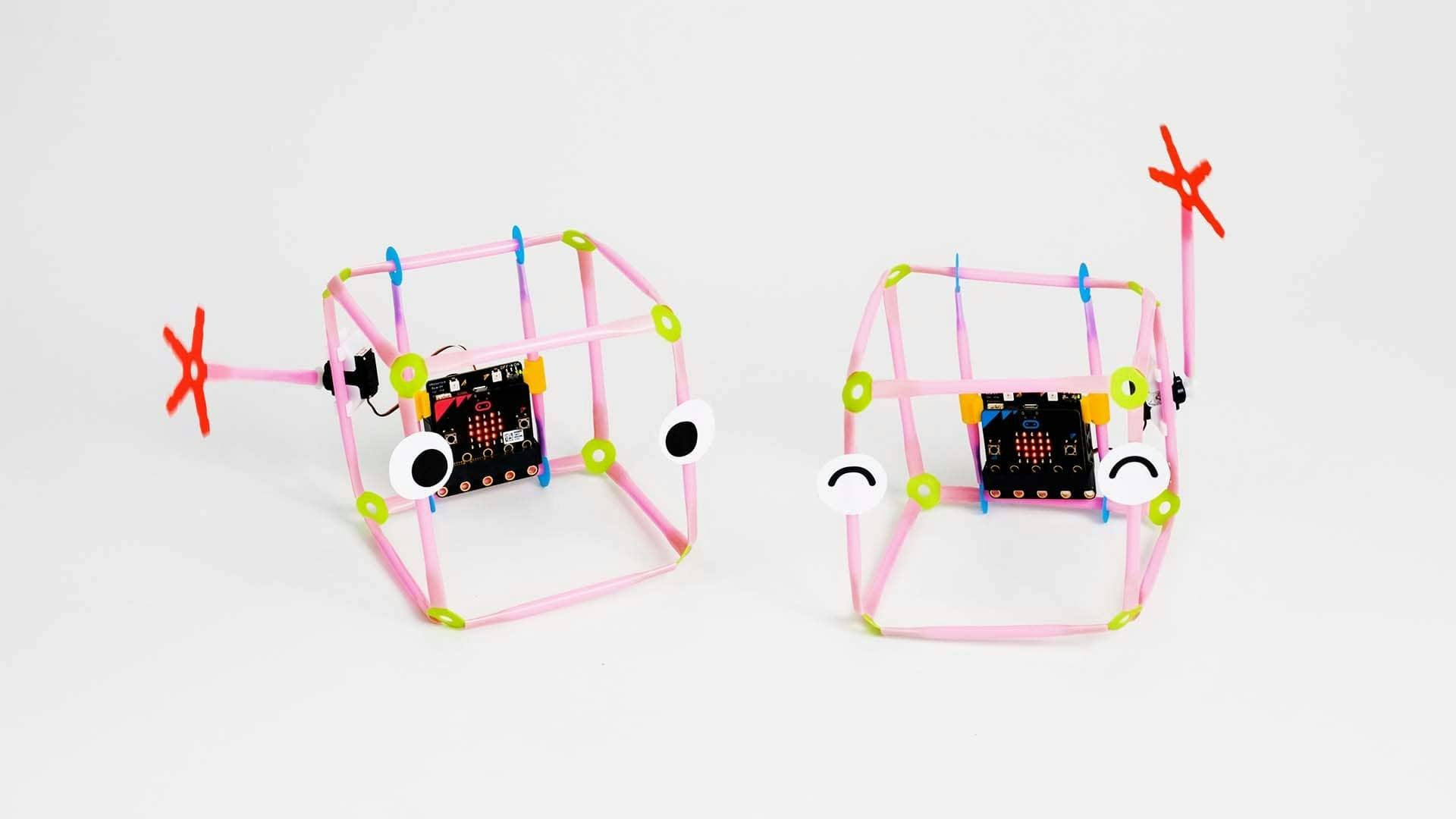
Pair of Facebots expressing themselves!