Activity
Code Two micro:bits as a Servo Remote Controller
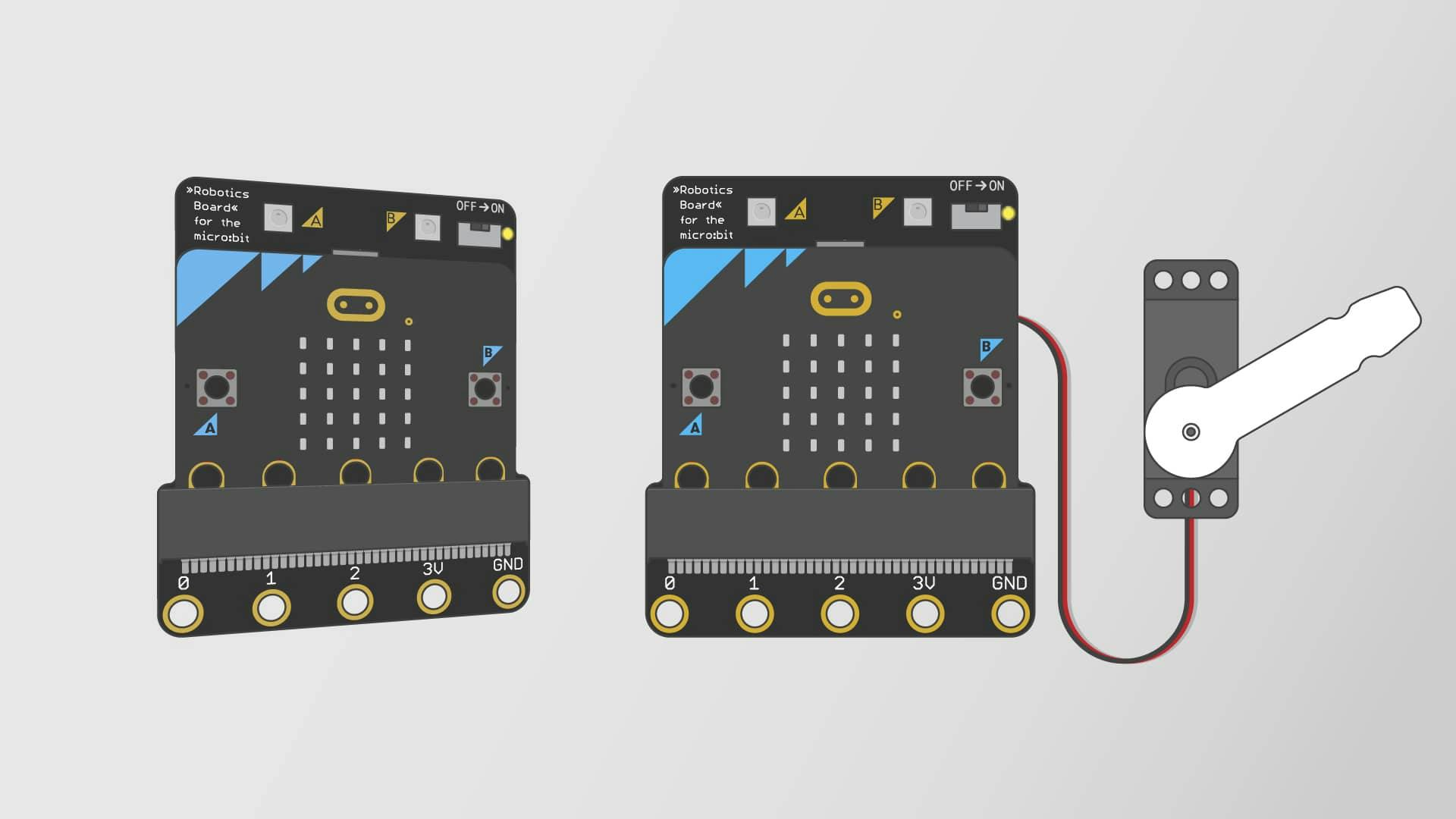
Create a remote control to send signals to a second micro:bit, instructing a servo motor to initiate movement.
Coding
Get Started
8-14+
40:00
micro:bit Coding Cards
Code
Servo Remote Controller
00:10
Sender
Set the radio group to 1, to connect with the receiver. Continuously send the number value of the readings from the accelerator y axis, converted from the range -1023 to 1023 (raw data) to 0 to 100 (valid servo positions).
let movement = 0
radio.setGroup(1)
basic.forever(function () {
movement = Math.map(input.acceleration(Dimension.X), -1023, 1023, 0, 100)
radio.sendValue("movement", movement)
})Receiver
Set the radio group to 1, to connect with the sender. Monitor the incoming radio number as receivedNumber and use it to set the Servo A position.
radio.onReceivedValue(function (name, value) {
if (name == "movement") {
sb.setServoPosition(sb.servo(SBServo.ServoA), value)
}
})
radio.setGroup(1)
If using micro:bit for the first time, follow this setup.